Stack (ST)
This module is the setup for a robotic arm stacking two cubes at the desired location, in the correct order.
Try running the algorithm on the setup (or see snapshots/ for pre-acquired results).
The most useful/informative outputs will be:
- out/aspx/, which stores the synthesized policies. For example, we can see the final policy:
if ha == 'GRASP' and flp(lgs(-0.100266, -80.894936, tz2)): return 'MOVE_TO_TARGET' elif ha == 'LIFT' and flp(lgs(0.6139, 41.856, bz1 + ty2)): return 'MOVE_TO_CUBE_BOTTOM' elif ha == 'LIFT' and flp(lgs(-0.142514, -103.338959, bz1)): return 'MOVE_TO_CUBE_TOP' elif ha == 'MOVE_TO_CUBE_BOTTOM' and flp(lgs(0.4281, 116.65596, ty2)): return 'LIFT' elif ha == 'MOVE_TO_CUBE_BOTTOM' and flp(lgs(-0.332, -20.043522, z)): return 'MOVE_TO_CUBE_TOP' elif ha == 'MOVE_TO_CUBE_BOTTOM' and flp(lgs(0.02998, 29400.211, bz1 + tz2)): return 'MOVE_TO_TARGET' elif ha == 'MOVE_TO_CUBE_TOP' and flp(lgs(-0.009927, 83562.8, bz2 + bz2)): return 'GRASP' elif ha == 'MOVE_TO_CUBE_TOP' and flp(lgs(0.176457, 44.735584, tz2)): return 'MOVE_TO_CUBE_BOTTOM' elif ha == 'MOVE_TO_TARGET' and flp(lgs(0.002998, -41319.92, abs(tx2) + abs(ty2))): return 'LIFT' return ha -
plots/accuracy.png and plots/likelihoods.png, which shows the progress of the EM loop across iterations. Here is a (slightly prettified) version for this task:
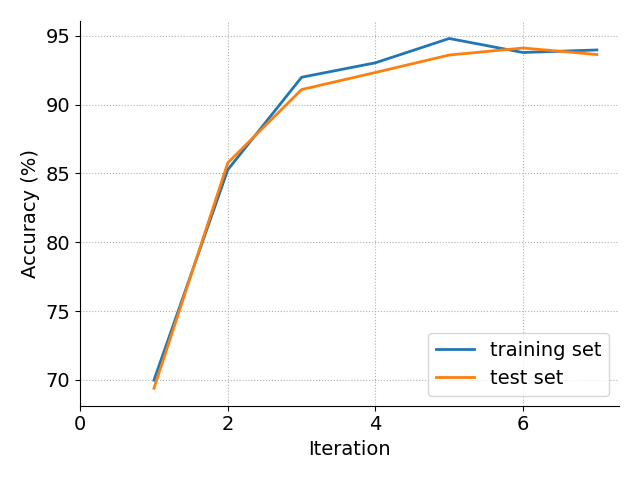
-
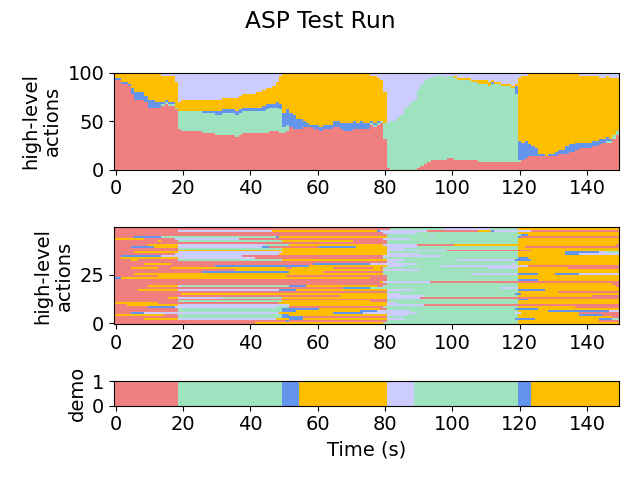
plots/testing/xx-x-graph.png, which gives a visual representation of the action labels selected by the policy on the testing set. The first number in the file name indicates the iteration. For example:
Iteration 1:
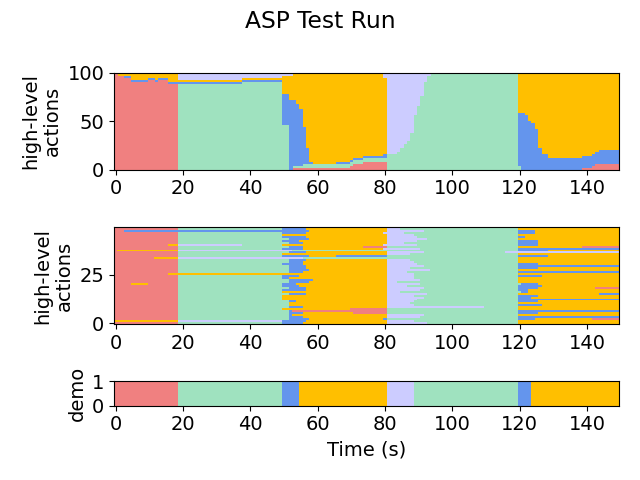
Iteration 2:
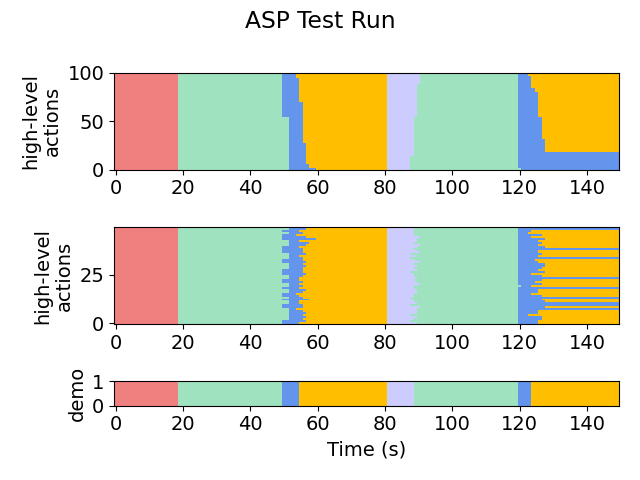
Iteration 7:
-
plots/testing/LA-xx-x-graph.png, which gives a visual representation of the low-level observations predicted by the policy on the testing set. For example:
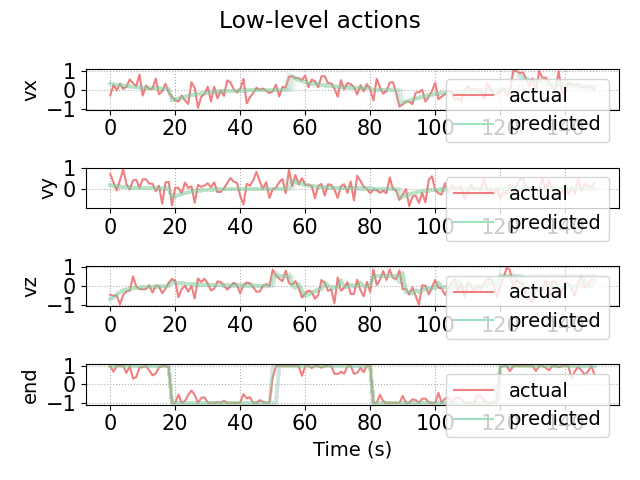
We also show the behavior of the synthesized policy directly in the simulator.
We provide the observation model below:
step(action):
if (action == MOVE_TO_CUBE_BOTTOM)
[vx, vy, vz] = 4 * [bx1 - x, by1 - y, bz1 - z]
end_eff = 1
else if (action == MOVE_TO_TARGET)
[vx, vy, vz] = 4 * [tx - x, ty - y, tz - z]
end_eff = -1
if (vz < 0)
vz = max(vz, vz_prev - 0.15)
else if (action == LIFT)
[vx, vy, vz] = [0, 0, 0.5]
end_eff = 1
else if (action == MOVE_TO_CUBE_TOP)
[vx, vy, vz] = 4 * [bx2 - x, by2 - y, bz2 - z]
end_eff = 1
if (vz < 0)
vz = max(vz, vz_prev - 0.15)
else if (action == GRASP)
[vx, vy, vz] = [0, 0, 0.5]
end_eff = -1