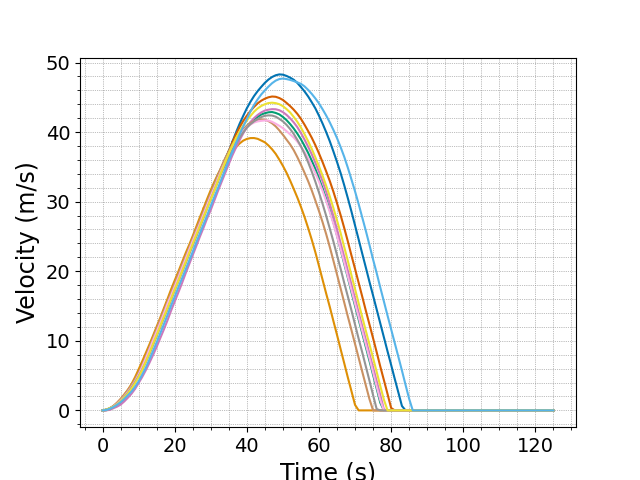
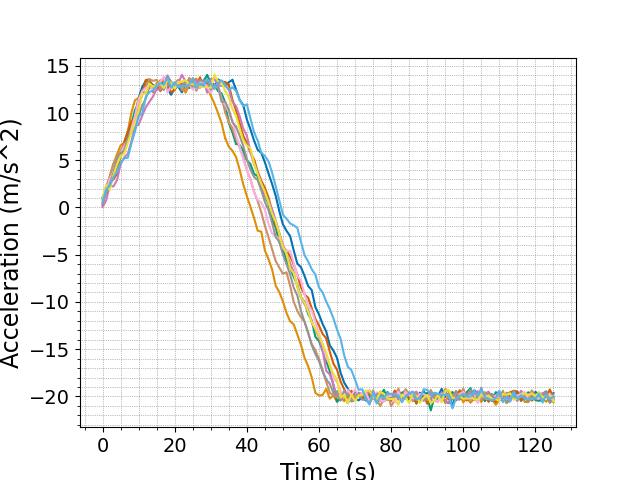
1D Target (Stop Sign)
This module is the setup for a simple vehicle driving in a straight line. The goal is to stop before some target stop sign. The following figures for acceleration and velocity demonstrate how realistic demonstrations contain a significant amount of variation and error:
Try running the algorithm on the setup by running make and make emng (or see snapshots/ for a selection of pre-acquired results).
The most useful/informative outputs will be:
- out/aspx/, which stores the synthesized policies. For example, we can see the final policy (which we have cleaned up here for presentation):
if ha == ACC and flp(lgs(Minus(v, v_max), -0.456573, 1.388253)): return CON if ha == ACC and flp(lgs(Minus(dns, DistTraveled(v, a_min)), -6.926392, -2.609171)): return DEC if ha == CON and flp(lgs(Minus(DistTraveled(v, a_min), dns), -2.829544, 0.814321)): return DEC return ha -
plots/accuracy.png and plots/likelihoods.png, which shows the progress of the EM loop across iterations. Here is a (slightly prettified) version for this task:
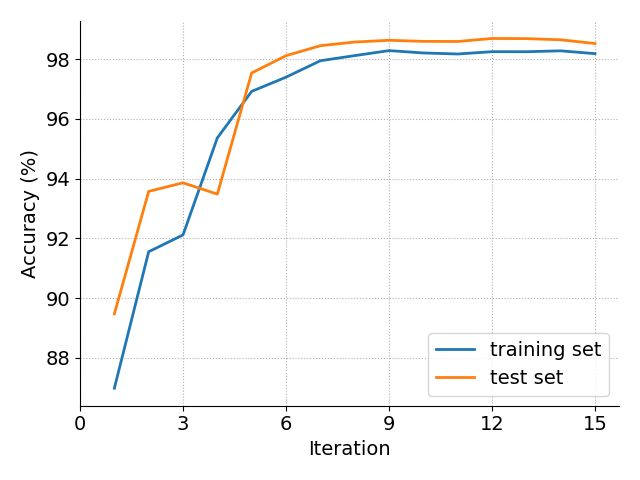
-
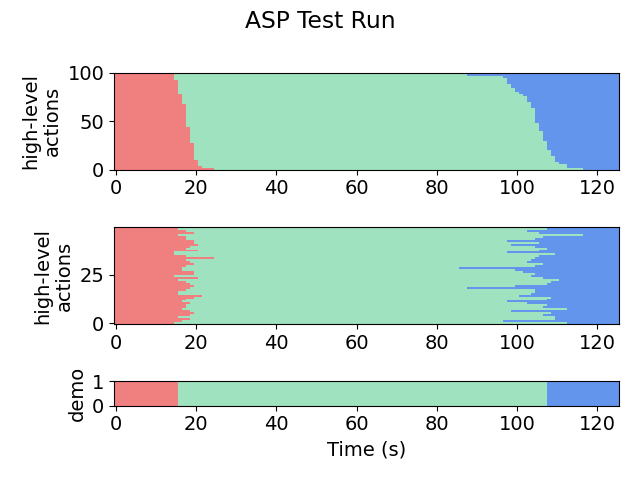
plots/testing/xx-x-graph.png, which gives a visual representation of the action labels selected by the policy on the testing set. The first number in the file name indicates the iteration. For example:
Iteration 1:
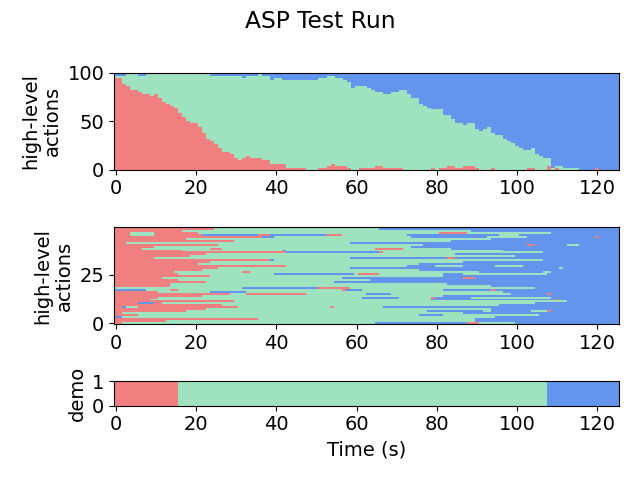
Iteration 2:

Iteration 9:
-
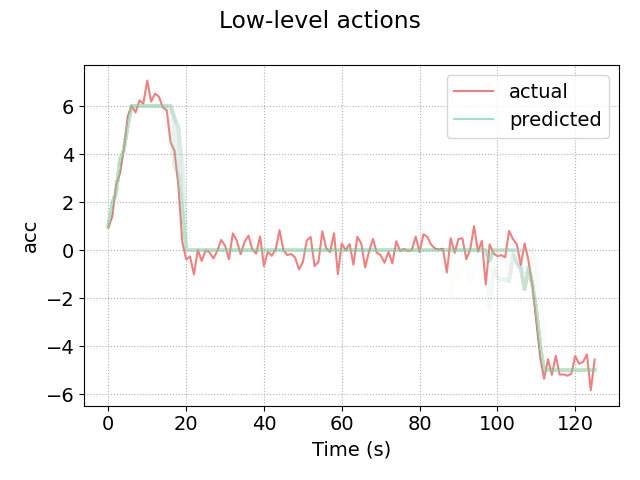
plots/testing/LA-xx-x-graph.png, which gives a visual representation of the low-level observations predicted by the policy on the testing set. For example, here is iteration 9:
Other outputs include:
- sim/ - contains the simulated trajectories for each robot
- out/aspx/ - contains the synthesized program at each iteration
- out/examples/ - contains the particle filter outputs at each iteration, in csv format
- out/states/ - contains pure ASP outputs, in csv format (i.e. the action labels acquired by running the given ASP at each time step)
- plots/ - contains plots of trajectories for pretty viewing
We provide the observation model below:
step(action):
if (action == ACC)
acc = min(acc+1, acc_max)
else if (action == DEC)
acc = max(acc-1, acc_min)
else if (action == CON)
if (acc < 0) acc = min(acc+1, 0)
else acc = max(acc-1, 0)