2D Highway, Human Demonstrations (Pass Traffic - Hand)
This module is roughly the same as PT, but the demonstrations are provided by a human joysticking the controls, so the behavior is significantly less predictable.
Try running the algorithm on the setup (or see snapshots/ for pre-acquired results).
Results are stored in out/.
- For example, we can see the final policy:
if ha == FASTER and And(flp(lgs(f_vx, 35.021538, -21.117664)), And(flp(lgs(Minus(f_x, l_x), -28.455282, -0.111654)), And(flp(lgs(f_vx, 21.367447, -32.117924)), flp(lgs(Minus(f_x, x), 22.931559, -0.621136))))): return LANE_LEFT if ha == FASTER and flp(lgs(DividedBy(Minus(f_x, x), f_vx), 0.903634, -9.377876)): return LANE_RIGHT if ha == FASTER and Or(flp(lgs(Minus(r_x, l_x), 142.693558, 26.650047)), Or(flp(lgs(Plus(f_vx, r_vx), -108.861458, -0.039834)), And(flp(lgs(vx, 24.874939, -61.811741)), flp(lgs(Minus(f_x, Plus(l_x, r_x)), -557.253906, -0.012443))))): return SLOWER if ha == LANE_LEFT and And(flp(lgs(r_vx, 19.766947, 2.068509)), flp(lgs(Minus(x, f_x), -31.710594, -0.294839))): return FASTER if ha == LANE_LEFT and Or(flp(lgs(DividedBy(x, l_vx), 34.269012, 245.851440)), And(flp(lgs(x, 235.960114, -0.653907)), Or(flp(lgs(l_vx, 126.732285, -0.239940)), flp(lgs(Plus(l_vx, r_vx), 44.333492, 2.931920))))): return LANE_RIGHT if ha == LANE_LEFT and flp(lgs(vx, 24.829386, -86.008926)): return SLOWER if ha == LANE_RIGHT and And(flp(lgs(l_vx, 20.476099, 0.709218)), flp(lgs(Minus(x, f_x), -26.473980, -0.609106))): return FASTER if ha == LANE_RIGHT and And(flp(lgs(vx, 25.023340, 8.410436)), And(flp(lgs(Plus(l_vx, r_vx), 41.128242, -2.412731)), flp(lgs(f_vx, 20.260880, -5.940400)))): return LANE_LEFT if ha == LANE_RIGHT and flp(lgs(Times(vx, Plus(Plus(vx, Plus(vx, l_vx)), f_vx)), 2233.293213, -0.184224)): return SLOWER if ha == SLOWER and flp(lgs(Times(vx, Plus(Plus(vx, vx), f_vx)), 1764.555542, 0.051010)): return FASTER if ha == SLOWER and And(flp(lgs(DividedBy(Minus(r_x, f_x), l_vx), 1.813058, 0.469895)), flp(lgs(vx, 24.549904, 27.209173))): return LANE_LEFT if ha == SLOWER and Or(flp(lgs(Plus(r_vx, r_vx), 37.099731, -12.132344)), flp(lgs(vx, 25.158022, 46.733471))): return LANE_RIGHT return ha
Plots are stored in plots/. See:
-
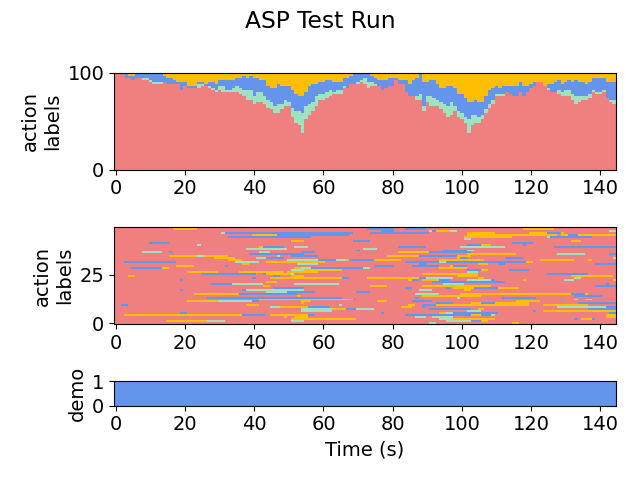
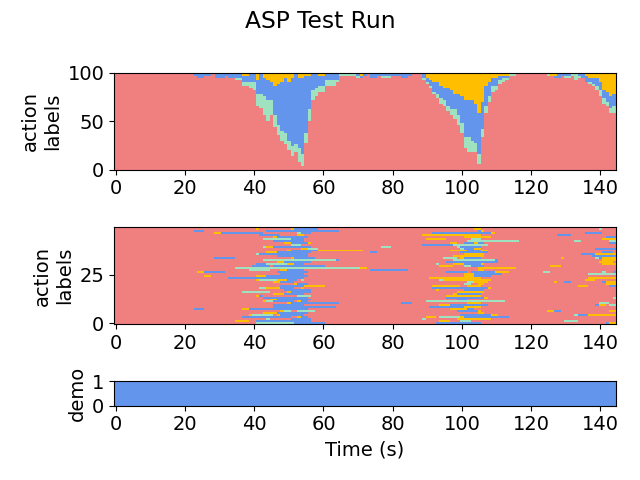
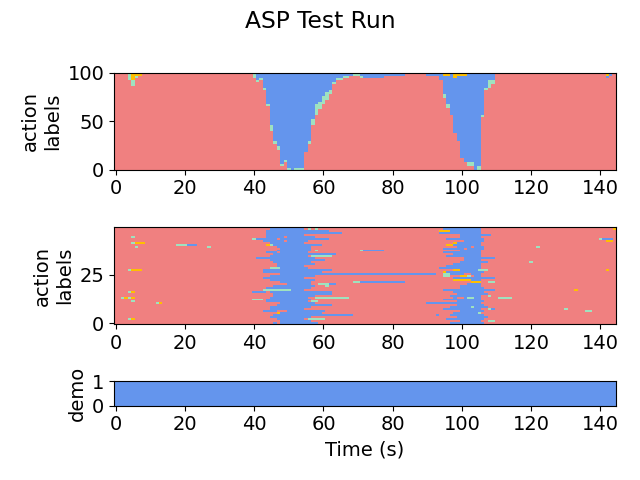
plots/testing/xx-x-graph.png, which gives a visual representation of the action labels selected by the policy on the testing set. For example:
Iteration 1:
Iteration 2:
Iteration 5:
-
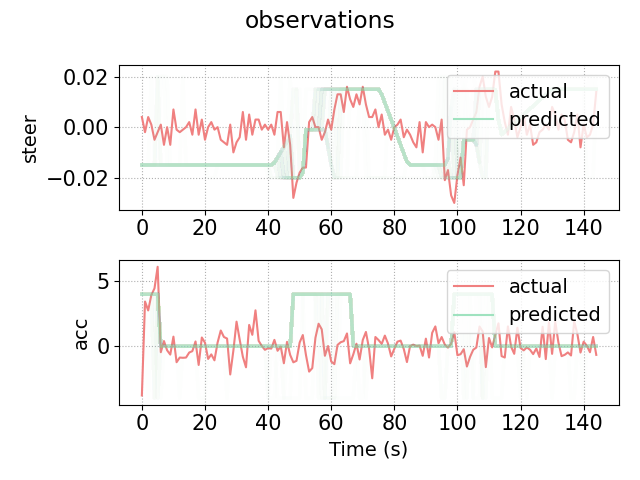
plots/testing/LA-xx-x-graph.png, which gives a visual representation of the low-level observations predicted by the policy on the testing set. For example, here is iteration 5:
We provide the observation model below:
step(action):
target_acc = 0
target_heading = 0
if (action == FASTER)
target_acc = 4
target_heading = atan((round(y) - y) / 30)
target_steer = max(min(target_heading - heading), 0.015, -0.015)
else if (action == SLOWER)
target_acc = -4
target_heading = atan((round(y) - y) / 30)
target_steer = max(min(target_heading - heading), 0.015, -0.015)
else if (action == LANE_LEFT)
target_acc = 4
target_heading = -0.02
else if (action == LANE_RIGHT)
target_acc = 4
target_heading = 0.02
if (v > 25)
target_acc = min(target_acc, 0.0)
if (v < 20)
target_acc = max(target_acc, 0.0)
if (target_acc > acc)
acc = min(target_acc, acc + 4)
else
acc = max(target_acc, acc - 6)
if (target_steer > 0)
steer = min(target_steer, 0.1 - heading)
else
steer = max(target_steer, -0.1 - heading)