2D Highway Env (Pass Traffic)
This module is the setup for a vehicle performing lane-changing maneuvers. The goal is to travel as far as possible without crashing.
Note that this setup differs from the 1D-target example in that the demonstrations are provided by the python programs in python-gen (try running highway2d.py). Demonstrations will be placed into that folder automatically. As a result, the setup does not require filling out robotSets.h, a simulation ASP, a physics model, or their corresponding settings.
Try running the algorithm on the setup (or see snapshots/ for pre-acquired results).
The most useful/informative outputs will be:
- out/aspx/, which stores the synthesized policies. For example, we can see the final policy (which we have cleaned up here for presentation):
if ha == FASTER and And(flp(lgs(Minus(r_x, l_x), -42.325607, -11.322358)), flp(lgs(Minus(x, f_x), -39.853004, 0.471738))): return LANE_LEFT if ha == FASTER and And(flp(lgs(Minus(r_x, f_x), 2.268923, 1.691306)), flp(lgs(Minus(x, f_x), -37.500061, 0.498594))): return LANE_RIGHT if ha == FASTER and flp(lgs(DividedBy(Minus(f_x, x), vx), 0.977072, -31.665253)): return SLOWER if ha == LANE_LEFT and flp(lgs(DividedBy(Minus(f_x, x), r_vx), 2.090207, 93.243362)): return FASTER if ha == LANE_LEFT and false: return LANE_RIGHT if ha == LANE_LEFT and flp(lgs(Minus(l_x, x), 30.264160, -3.164596)): return SLOWER if ha == LANE_RIGHT and flp(lgs(DividedBy(Minus(f_x, x), vx), 1.538538, 14.793274)): return FASTER if ha == LANE_RIGHT and false: return LANE_LEFT if ha == LANE_RIGHT and flp(lgs(DividedBy(Minus(x, r_x), vx), -0.984751, 182.378754)): return SLOWER if ha == SLOWER and flp(lgs(DividedBy(Minus(f_x, x), vx), 1.495547, 73.774384)): return FASTER if ha == SLOWER and flp(lgs(Minus(l_x, f_x), 5.026824, 4.910437)): return LANE_LEFT if ha == SLOWER and flp(lgs(Minus(r_x, f_x), 1.479489, 1.003578)): return LANE_RIGHT return ha -
plots/accuracy.png and plots/likelihoods.png, which shows the progress of the EM loop across iterations. Here is a (slightly prettified) version for this task:
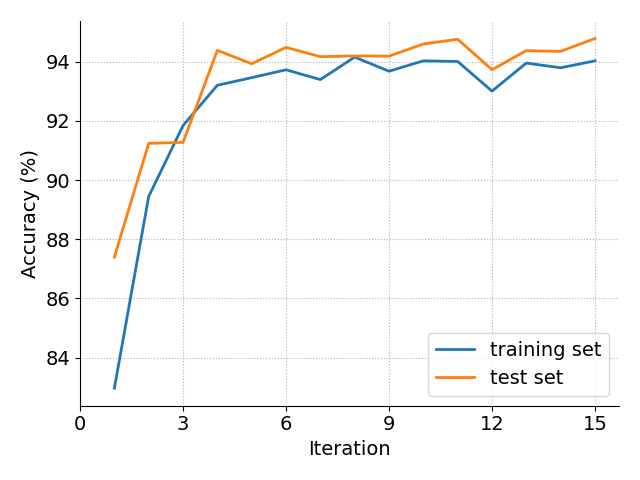
-
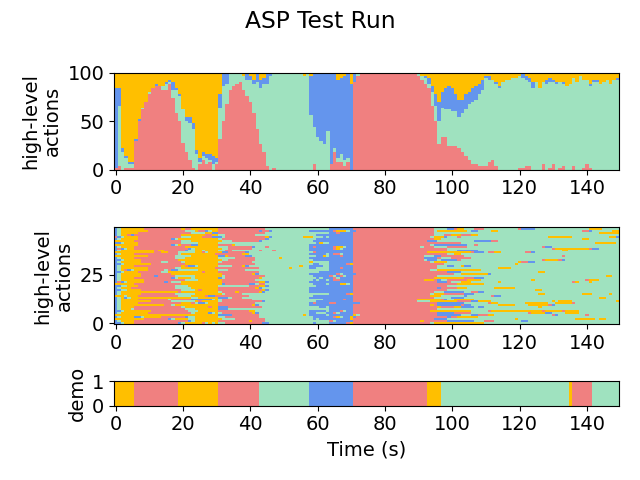
plots/testing/xx-x-graph.png, which gives a visual representation of the action labels selected by the policy on the testing set. The first number in the file name indicates the iteration. For example:
Iteration 1:
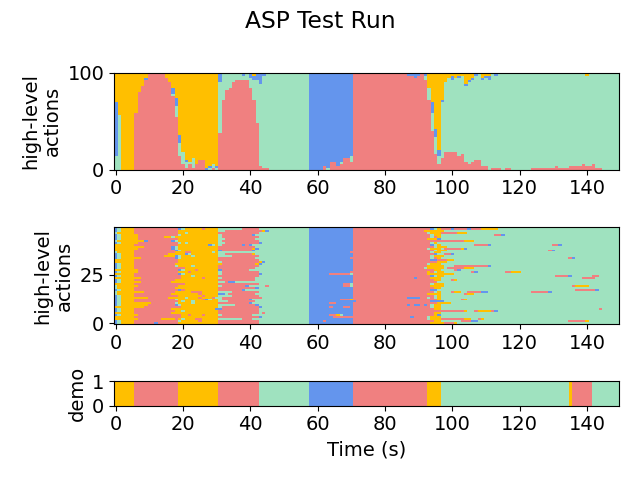
Iteration 2:
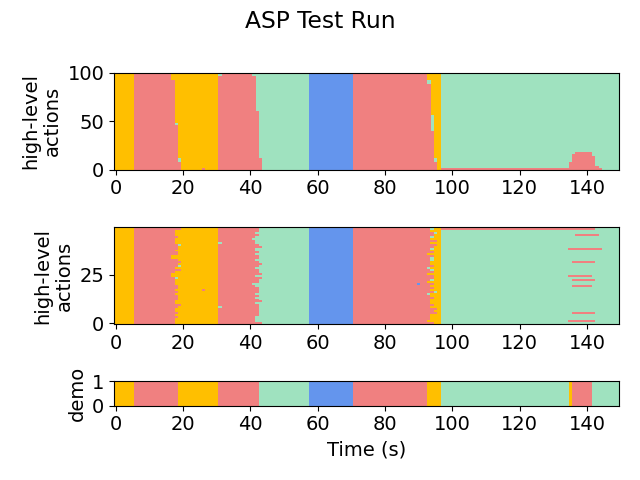
Iteration 14:
-
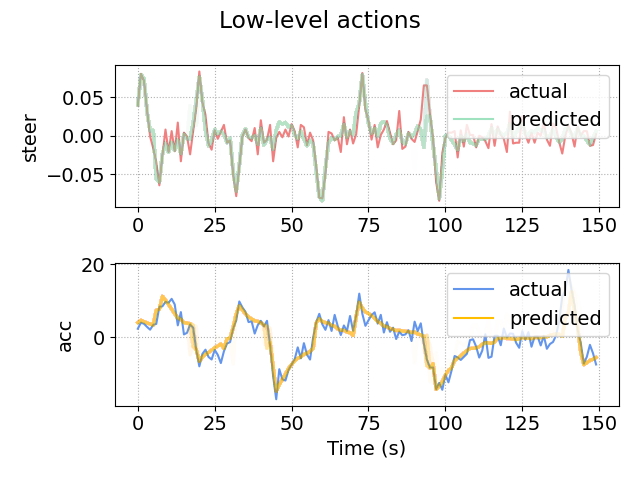
plots/testing/LA-xx-x-graph.png, which gives a visual representation of the low-level observations predicted by the policy on the testing set. For example, here is iteration 14:
We also show the behavior of the synthesized policy directly in the simulator.
Iteration 1:
Iteration 3:
Iteration 8:
We provide the observation model below:
step(action):
target_acc = 0
target_heading = 0
if (action == FASTER)
target_acc = 40 - v
target_heading = atan((round(y) - y) / 30)
else if (action == SLOWER)
target_acc = v_front - v
target_heading = atan((round(y) - y) / 30)
else if (action == LANE_LEFT)
target_acc = 30 - v
target_heading = -0.15
else if (action == LANE_RIGHT)
target_acc = 30 - v
target_heading = 0.15
if (target_heading - heading > steer)
steer = min(steer + 0.04, target_heading - heading)
else
steer = max(steer - 0.04, target_heading - heading)
if (target_acc > acc)
acc = min(target_acc, acc + 4)
else
acc = max(target_acc, acc - 6)