Pick and Place (PP)
This module is the setup for a robotic arm picking up a cube and placing it at the desired location.
Try running the algorithm on the setup (or see snapshots/ for pre-acquired results).
The most useful/informative outputs will be:
- out/aspx/, which stores the synthesized policies. For example, we can see the final policy:
if ha == "MOVE_TO_CUBE" and flp(lgs(Minus(Minus(Abs(x), Abs(bx)), Plus(Minus(z, bz), Minus(Abs(Minus(z, Abs(bx))), Abs(x)))), 0.011845, 539.856995)): return "MOVE_TO_TARGET" if ha == "MOVE_TO_TARGET" and false: return "MOVE_TO_CUBE" return ha -
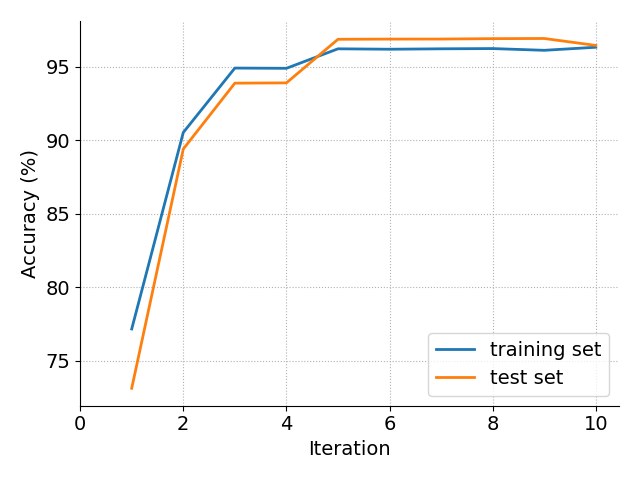
plots/accuracy.png and plots/likelihoods.png, which shows the progress of the EM loop across iterations. Here is a (slightly prettified) version for this task:
-
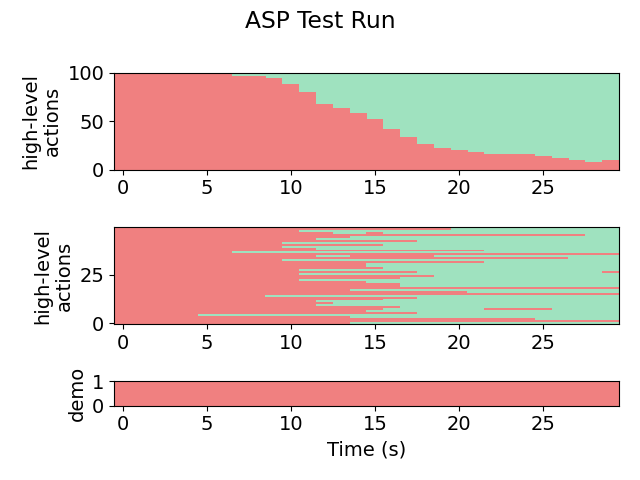
plots/testing/xx-x-graph.png, which gives a visual representation of the action labels selected by the policy on the testing set. The first number in the file name indicates the iteration. For example:
Iteration 1:
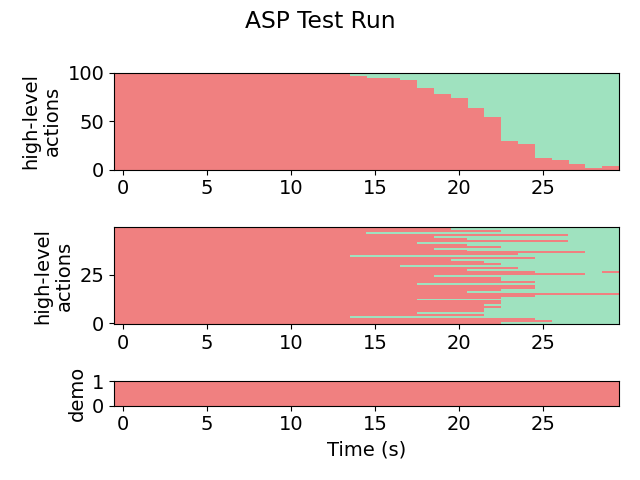
Iteration 2:
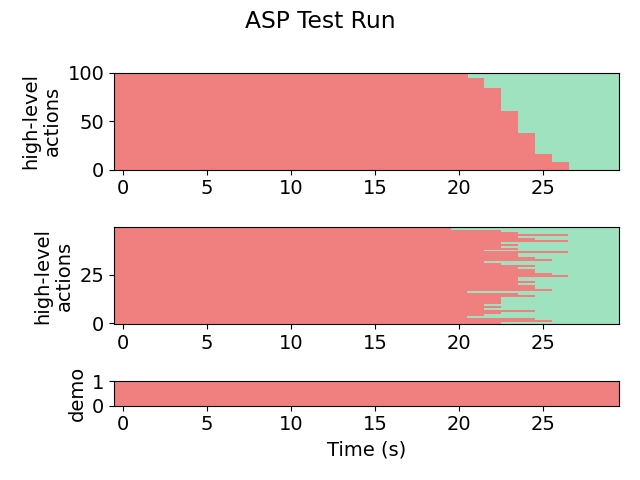
Iteration 8:
-
plots/testing/LA-xx-x-graph.png, which gives a visual representation of the low-level observations predicted by the policy on the testing set. For example:
We also show the behavior of the synthesized policy directly in the simulator.
We provide the observation model below:
step(action):
if (action == MOVE_TO_CUBE)
[vx, vy, vz] = 5 * [bx - x, by - y, bz - z]
end_eff = 0.6
else if (action == MOVE_TO_TARGET)
if (end_eff > -0.3)
[vx, vy, vz] = 5 * [bx - x, by - y, bz - z]
end_eff = -0.6
else
[vx, vy, vz] = 5 * [tx - x, ty - y, tz - z]
end_eff = max(-0.6, end_eff - 0.3)