2D Merge, Human Demonstrations (Merge - Hand)
This module is roughly the same as MG, but the demonstrations are provided by a human joysticking the controls, so the behavior is significantly less predictable.
Try running the algorithm on the setup (or see snapshots/ for pre-acquired results).
Results are stored in out/.
- For example, we can see the final policy:
if ha == FASTER and flp(lgs(x, 1043.003418, 0.010987)): return LANE_LEFT if ha == FASTER and Or(flp(lgs(Minus(r_x, x), 24.256481, 0.261414)), flp(lgs(Minus(r_x, x), -7.083443, -10.012507))): return LANE_RIGHT if ha == FASTER and And(flp(lgs(Minus(r_x, f_x), -5.321127, 27.355986)), flp(lgs(Minus(y, r_y), -2.810756, 45.921741))): return SLOWER if ha == LANE_LEFT and And(flp(lgs(Plus(y, r_y), 27.675999, -28.561993)), Or(flp(lgs(Minus(r_y, y), 4.606244, -14.761892)), Or(flp(lgs(Minus(f_x, r_x), 131.751694, 4.325001)), flp(lgs(f_x, 364.858917, -1.114238))))): return FASTER if ha == LANE_LEFT and false: return LANE_RIGHT if ha == LANE_LEFT and flp(lgs(f_x, 389.029755, -1.134043)): return SLOWER if ha == LANE_RIGHT and Or(flp(lgs(Minus(r_y, Plus(x, f_y)), -407.739685, -2.902149)), flp(lgs(f_y, 13.234916, 0.499033))): return FASTER if ha == LANE_RIGHT and flp(lgs(Minus(f_x, r_x), 168.824478, 0.089852)): return LANE_LEFT if ha == LANE_RIGHT and flp(lgs(Times(x, y), 4744.125977, 0.026073)): return SLOWER return ha
Plots are stored in plots/. See:
-
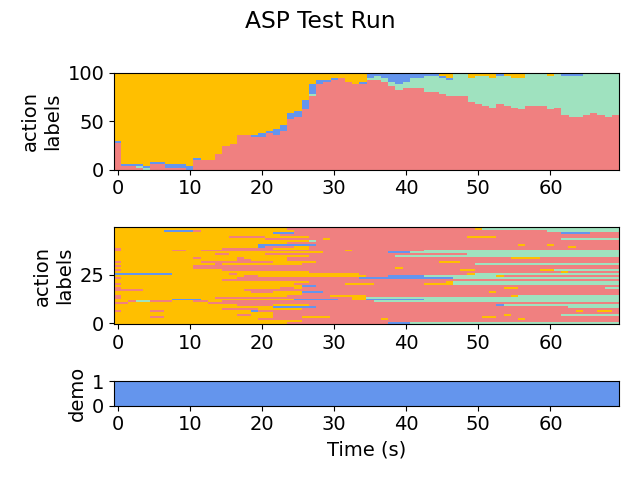
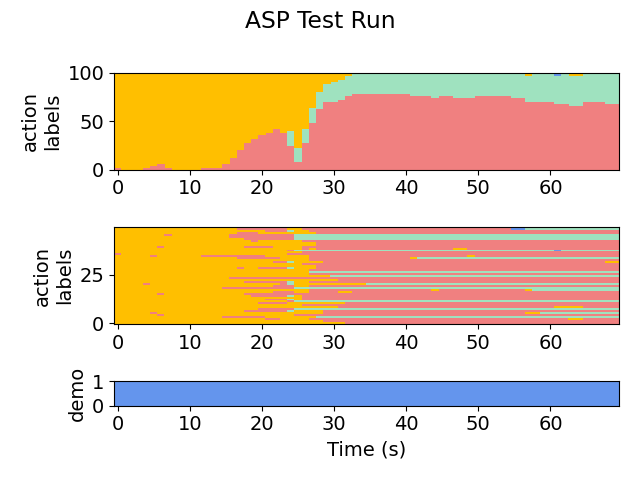
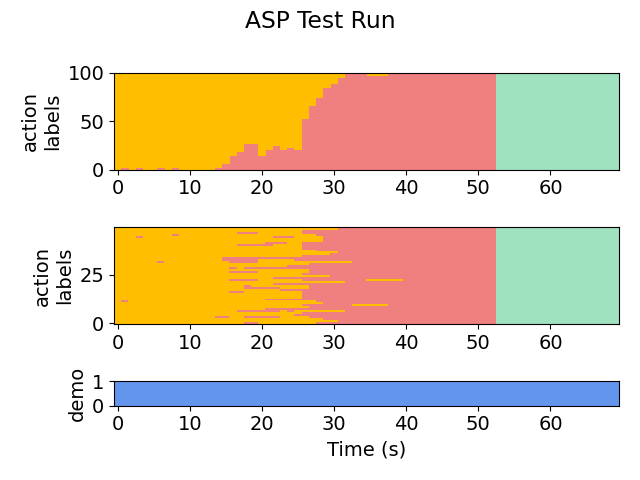
plots/testing/xx-x-graph.png, which gives a visual representation of the action labels selected by the policy on the testing set. For example:
Iteration 1:
Iteration 2:
Iteration 5:
-
plots/testing/LA-xx-x-graph.png, which gives a visual representation of the low-level observations predicted by the policy on the testing set. For example, here is iteration 5:
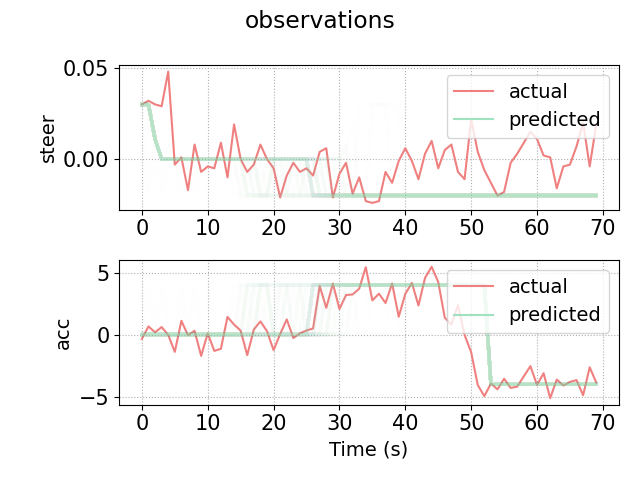
We provide the observation model below:
step(action):
if (action == FASTER)
acc = 4
target_heading = atan((round(y) - y) / 30)
steer = max(min(target_heading - heading), 0.02, -0.02)
else if (action == SLOWER)
acc = -4
target_heading = atan((round(y) - y) / 30)
steer = max(min(target_heading - heading), 0.02, -0.02)
else if (action == LANE_LEFT)
acc = 0
steer = max(min(-0.1 - heading, 0.0), -0.03)
else if (action == LANE_RIGHT)
acc = 0
steer = max(min(0.1 - heading, 0.03), 0.0)